
1. An Introduction to Abaqus Damping
What is Abaqus damping, and why is it important?This passage delves into the world of Abaqus damping, with a particular focus on material damping Abaqus, Rayleigh damping Abaqus, structural damping Abaqus, and Abaqus global damping. Damping in Abaqus is a vital concept, aimed at reducing or controlling movement in dynamic systems. It finds application in various scenarios, including viscoelastic Abaqus, where the Prony series Abaqus formulation is employed. Material damping Abaqus is explored in depth, covering its use in both direct-integration and mode-based dynamic analyses. Structural damping in Abaqus is discussed, emphasizing its suitability for models involving frictional behavior or local friction effects. Abaqus global damping is presented as a way to improve performance in preliminary design. This passage offers valuable insights for those seeking to understand and apply Abaqus damping techniques and includes references to Abaqus viscoelastic tutorials for further learning.
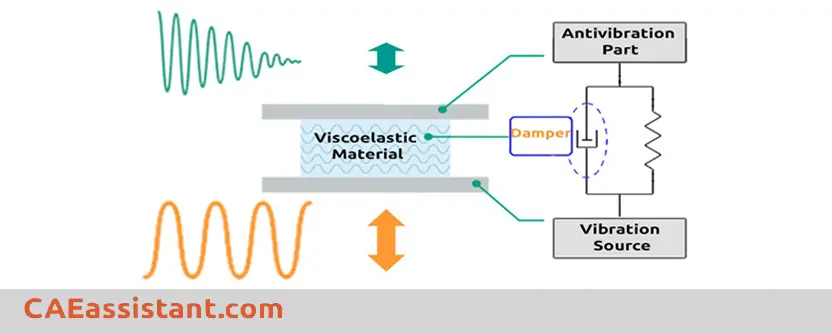
As mentioned above, damping is an influence within or upon a dynamic system that has the effect of reducing, restricting, or preventing its movements. In physical systems, damping is produced by processes that dissipate energy. Damping forces come from several sources simultaneously, such as energy loss during hysteretic loading, viscoelastic material properties, contact friction and so on. If would like to know more about the basic concepts of damping, you can simply click on “what-is-damping?“
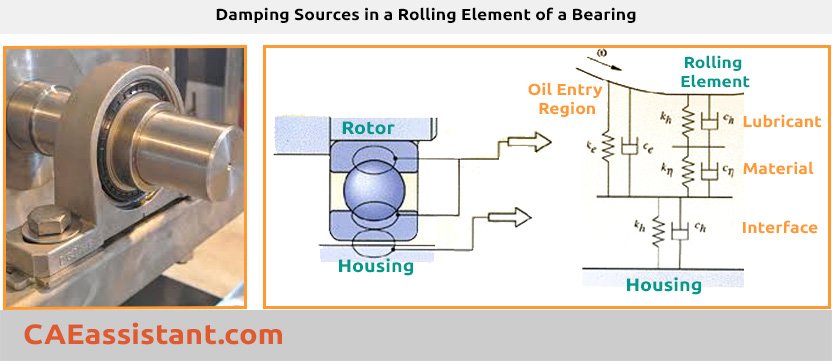
Damping in a rolling bearing [Ref]
Explore our comprehensive free Abaqus course, featuring a rich collection of practical examples and detailed tutorials that can help you fully understand the tutorials on this blog. Before you begin, join our ever-growing community of students by simply clicking on the ‘Free Course‘ link. Stay with CAE Assistant.
2. Sources of Damping
Generally, we can have damping resulting from:
1. Material nonlinearity ⇒ inelastic dissipation
2. Internal friction ⇒ material behavior
3. External friction ⇒ joint behavior
3. Why do we use Abaqus Damping?
We take the profit of Abaqus damping to accurately models the energy loss in a dynamic system. Damping is also beneficial when modeling very fast phenomena and noisy dynamics. It will play a critical role to have a meaningful solution.
So, there are two main reasons for adding damping to a model: to limit numerical oscillations or to add physical damping to the system.
4. How can we Model Damping in Abaqus?
| The most widely used damping form called viscous damping, in which the damping force is velocity proportional. In fact, the complex damping may be proportional to the square of velocity, such as the damping force of solid motion in liquid, and sometimes, it even has nothing to do with speed, such as the friction at the supports. |
Two primary aspects for defining Abaqus damping are available:
* Velocity-proportional
Viscous damping
** Displacement-proportional
Abaqus Structural damping (imaginary stiffness) is used in frequency domain dynamics and in mode-based transient dynamics.
5. How can we enter data for damping in Abaqus?
In general, Abaqus has five categories of damping definition sources:
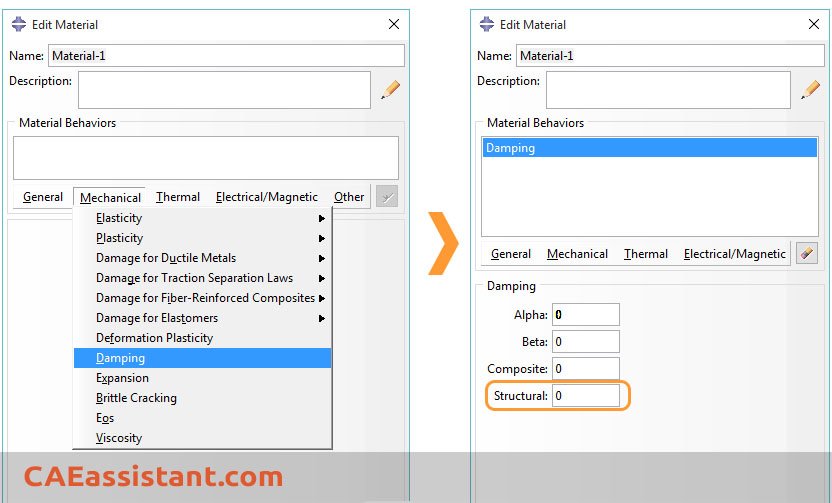
5.1. Material Damping Abaqus
You specify Material damping in Abaqus when defining material. When a structure is subjected to oscillatory deformations, its state is represented by a mix of kinetic and potential energy. Some of this energy is lost per deformation cycles in real structures, which is known as material damping.(will further discuss)
5.2. Element Damping
Abaqus damping for this type Includes contributions from complex spring elements, dashpot elements and connector elements (using connector damping)
5.3. Abaqus Global Damping
Abaqus global damping is assumed when the damping coefficient is constant in all materials. It is essentially a crude approximation aimed at improving performance, especially during preliminary design.
5.4. Abaqus Modal Damping
Applies only to mode-based linear dynamic analyses, so it can only be used in Abaqus/Standard.
5.5. Artificial Damping
Damping associated with the time integration method (numerical damping).
Here, we only focus on material damping in Abaqus. Other types will discuss later in future articles.
6. Material Damping Abaqus
In most cases, the material model itself may provide damping in the form of plastic dissipation or viscoelasticity. For many applications such damping may be adequate. Another option is to use Rayleigh damping or structural damping.
Material damping Abaqus can be defined for both direct-integration (nonlinear, implicit or explicit) and mode-based (linear) dynamic analyses.
 |
⭐⭐⭐ Abaqus Course | ⏰10 hours Video 👩🎓+1000 Students ♾️ Lifetime Access
✅ Module by Module Training ✅ Standard/Explicit Analyses Tutorial ✅ Subroutines (UMAT) Training … ✅ Python Scripting Lesson & Examples |
7. Forms of Material Damping in Abaqus
♦ Rayleigh damping (Viscous damping)
♦ Structural damping
♦ Viscoelasticity (for viscoelastic materials)
In the following sections, we’re going to fully discuss the forms of material damping. Now, let’s start with Abaqus Rayleigh damping.
7.1. Rayleigh Damping Abaqus
Some models do not have any dissipation sources (an example is a linear system with chattering contact, such as a pipeline in a seismic event). In such cases, it is often desirable to introduce some general damping. Abaqus provides Rayleigh damping for this purpose. It provides a convenient abstraction to damp lower (mass-dependent) and higher (stiffness-dependent) frequency range behavior. (material damping)
In the Rayleigh model, damping is linearly proportional to mass M and stiffness K matrices. A damping matrix C is added to the system. We define C as:
![]()
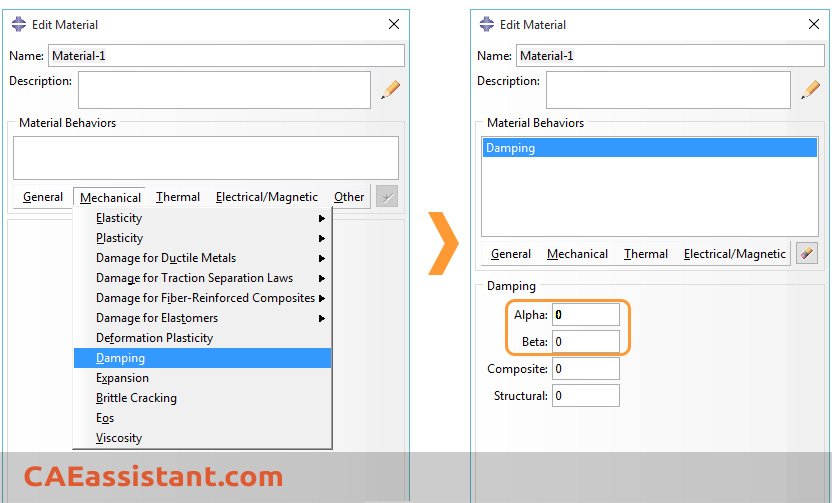
C matrices are generated for each material in the model. We define the Rayleigh damping factors (alpha, beta) as material properties in Abaqus:
 Supposing that only Abaqus Rayleigh damping is present in the model and all the materials use identical Rayleigh damping factors, we can find a relation between the effective system damping ratio and the Rayleigh damping parameters. According to the orthogonality between mass matrix and stiffness matrix, for each natural frequency of the system ωi, the effective damping ratio is equal to:
Supposing that only Abaqus Rayleigh damping is present in the model and all the materials use identical Rayleigh damping factors, we can find a relation between the effective system damping ratio and the Rayleigh damping parameters. According to the orthogonality between mass matrix and stiffness matrix, for each natural frequency of the system ωi, the effective damping ratio is equal to:
To define Abaqus Rayleigh damping, we need to calculate alpha and beta. For this purpose, let’s assume our objective is to impose a 5% damping ratio on a structure. To accomplish this, we will perform a modal analysis to determine the frequencies, denoted as omega 1 and omega 2, associated with the first and second modes. Then, using these frequencies, we will calculate the alpha and beta values.
Reminder. Damping Ratio………………………………………………………………………………………………..
The fraction of critical damping or damping ratio is defined as:
 And natural frequency is:
And natural frequency is:
 Where c, k and m are damping, stiffness and mass of each mode, respectively.
Where c, k and m are damping, stiffness and mass of each mode, respectively.
………………………………………………………………………………………………………………………………………………………………………..
Thus, mass-proportional damping dominates when the frequency is low, and stiffness-proportional damping dominates when the frequency is high:
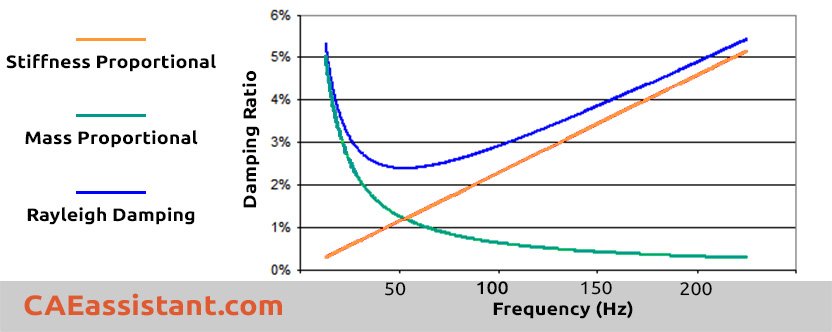
The orange line shows stiffness-proportional damping, which is straightforward because the damping ratio goes up as frequency goes up. On the other hand, the green line represents mass-proportional damping, where the damping ratio decreases as frequency increases, making a wavy curve. Often, you’ll see both of these damping types together, and their combined effect is shown by the blue line. Here’s the fascinating part: when the natural frequency is low, mass-proportional damping is more important, but for higher natural frequencies, stiffness-proportional damping becomes more significant.
7.2. Abaqus Structural Damping
Assumes that the damping forces are proportional to the forces caused by stressing of the structure and are opposed to the velocity:
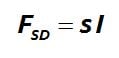 Where F and I are the damping force and the forces caused by stressing of the structure for every DOF, respectively.The user provides the “s” value when defining Abaqus structural damping in the material module.
Where F and I are the damping force and the forces caused by stressing of the structure for every DOF, respectively.The user provides the “s” value when defining Abaqus structural damping in the material module.
 Damping in real structures is frequency-dependent. Therefore, this is best suited for frequency domain dynamic procedures.
Damping in real structures is frequency-dependent. Therefore, this is best suited for frequency domain dynamic procedures.
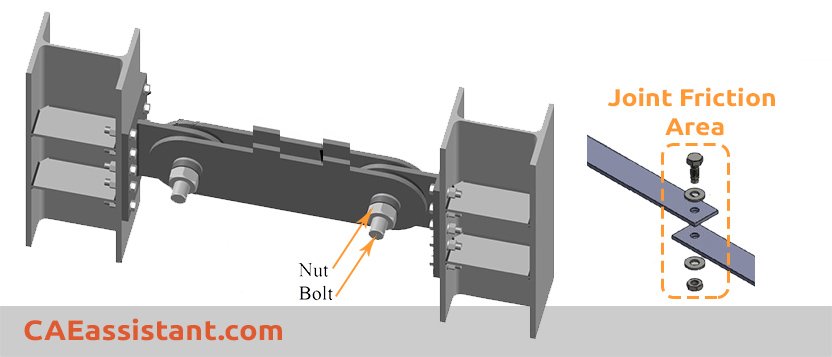
The damping forces due to structural damping are intended to represent frictional effects (as distinct from viscous effects). Thus, structural damping is suggested for models involving materials that exhibit frictional behavior (hysteretic damping) or where local frictional effects are present throughout the model, such as dry rubbing of joints in a multi-link structure.
7.3. Viscoelasticity
Let me provide a brief explanation of what viscoelastic materials are and how we can utilize them in Abaqus.
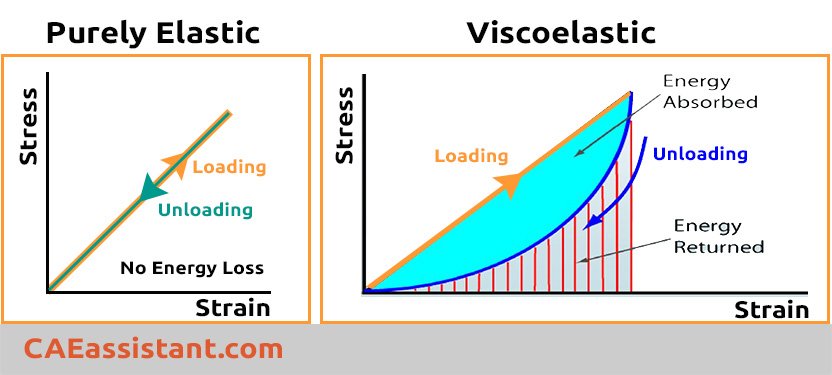
In the world of materials, elastic substances follow Hooke’s law, where stress is directly linked to strain.
![]()
This means that when we apply a load to an elastic material, there will be an instantaneous deformation. As long as we maintain the applied load, the deformation will remain constant. When we remove the load, all of the deformation will be fully recovered, demonstrating that elastic materials return to their original shape once the load is removed. On the other hand, viscous materials follow a different behavior, obeying the following law:
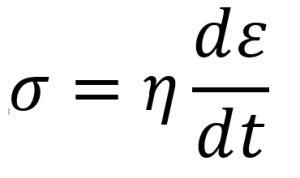
Where stress is directly proportional to strain rate not strain. Viscoelasticity is the property of materials that exhibit both viscous and elastic characteristics when undergoing deformation. The term viscous implies that they deform slowly when exposed to an external force. They cannot return to their first configuration. It is due to dissipation of energy. Elastic materials strain when stretched and immediately return to their original state once the stress is removed. Viscoelastic materials have elements of both of these properties:
Viscoelastic Abaqus model is useful for materials in which dissipative losses primarily caused by viscous (internal damping) effects. The model must be combined with an elastic material model. Viscoelasticity cannot be combined with any of the plasticity models. To delve deeper into this subject, check out the next section “Abaqus viscoelastic tutorial”, which will guide you through the modeling and simulation process using Abaqus software.
|
⭐⭐⭐ Abaqus Course | ⏰10 hours Video 👩🎓+1000 Students ♾️ Lifetime Access
✅ Module by Module Training ✅ Standard/Explicit Analyses Tutorial ✅ Subroutines (UMAT) Training … ✅ Python Scripting Lesson & Examples |
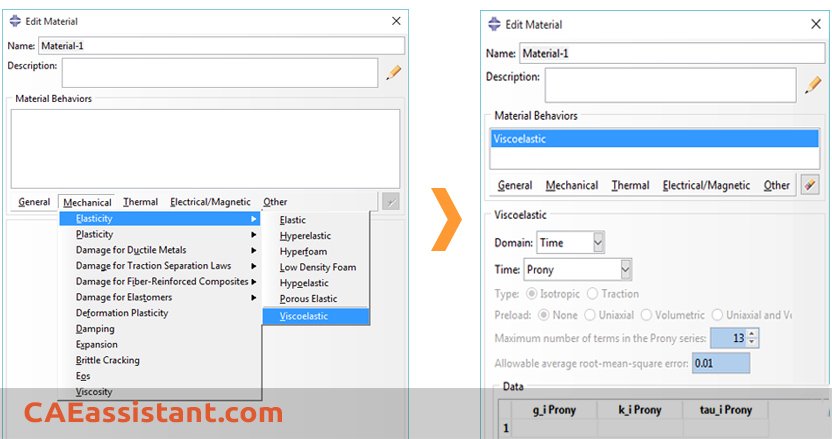
7.3.1. Defining viscoelasticity in Abaqus(Viscoelastic Abaqus)
Viscoelastic Abaqus can be defined as:
* Time domain viscoelasticity
Viscoelasticity is a function of time for transient analysis. It describes isotropic rate-dependent material behavior. We can use a Prony series formulation to enter data:
The Prony series Abaqus is an equation that describes the relationship between shear modulus (G) and time (T).

In this equation, T represents time, G(t) denotes the shear modulus at a given time, Gi represents the relaxation modulus, and τ represents the relaxation time. To fully characterize the parameters in the Prony series, we need to start by defining the instantaneous shear modulus. Additionally, we must define the relaxation modulus and relaxation time. Depending on the chosen value of ‘N’, we have to use a table that lists various values of relaxation modulus and relaxation time.
Furthermore, it’s important to define the instantaneous Young’s modulus, instantaneous Poisson’s ratio, and density to comprehensively describe the material’s behavior.
So, this was all about viscoelastic Abaqus using the Prony series. Check out our Free Course to access more information and become a professional in Abaqus. Let’s now explore Frequency domain viscoelasticity.
** Frequency domain viscoelasticity
Viscoelasticity in Abaqus is a function of frequency for steady-state small-vibration analyses. This analysis is limited to Abaqus/Standard.
For example, many applications of elastomers involve dynamic loading in the form of steady-state vibration, and often in such cases, the dissipative losses in the material must be modeled to obtain useful results.
Eager to hear from you…
The CAE Assistant is committed to addressing all your CAE needs, and your feedback greatly assists us in achieving this goal. If you have any questions or encounter complications, please feel free to comment here.
You can have the PDF of this page by clicking on In Detail: Abaqus Damping
| ✅ Subscribed students | +80,000 |
| ✅ Upcoming courses | +300 |
| ✅ Tutorial hours | +300 |
| ✅ Tutorial packages | +100 |
What is damping?
Damping is an influence within or upon a dynamic system that has the effect of reducing, restricting or preventing its movements. In physical systems, damping is produced by processes that dissipate energy.
What are the Sources of Damping?
Generally, Damping results from several sources, such as inelastic dissipation (Material nonlinearity), material behavior (Internal friction), and joint behavior (External friction).
How can we model damping in Abaqus?
There are two primary aspects for defining damping available in Abaqus. The most widely used damping form is called viscous damping, in which the damping force is velocity-proportional. Sometimes the damping force is Displacement-proportional such as the friction at the supports. This damping form is called Structural damping (imaginary stiffness).
What is the benefit of using damping in physical systems?
There are two main reasons for adding damping to a model: to limit numerical oscillations or to add physical damping to the system. Damping is also beneficial when modeling high-speed phenomena and noisy dynamics.
What is the damping definition sources in Abaqus?
In general, Abaqus has five categories of damping definition sources: Abaqus Material damping, Element damping (spring elements, dashpot elements, and connector elements), Abaqus global damping (constant damping coefficient), Modal damping (in mode-based linear dynamic analyses), and Artificial damping (numerical damping).
What are the forms of Material Damping in Abaqus?
There are three options to provide material damping in Abaqus. The viscoelasticity model is useful for materials in which dissipative losses are primarily caused by viscous (internal damping) effects. Rayleigh damping Abaqus (Viscous damping) is used to introduce general damping in models without dissipation sources (an example is a linear system with chattering contact, such as a pipeline in a seismic event). Another option is to use Abaqus structural damping. The damping forces due to structural damping are intended to represent frictional effects (as distinct from viscous effects).
Really thank you! Want more.
Very interesting information!Perfect just what I was searching for! Filia Kendrick Teriann